October 24, 2010
I took the Scratch 90 wing I have and scaled it down to 85%, or
roughly "Scratch 75."
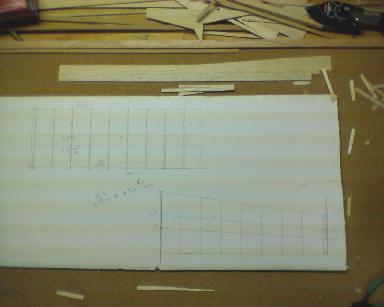
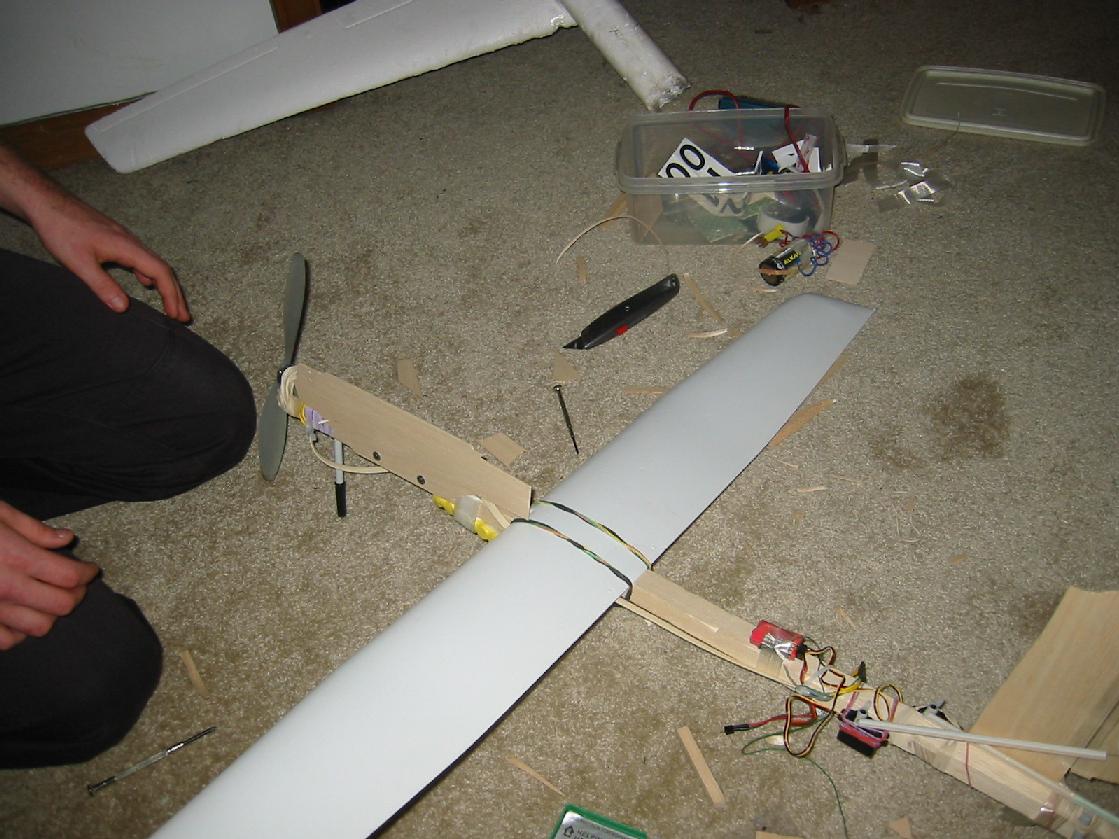
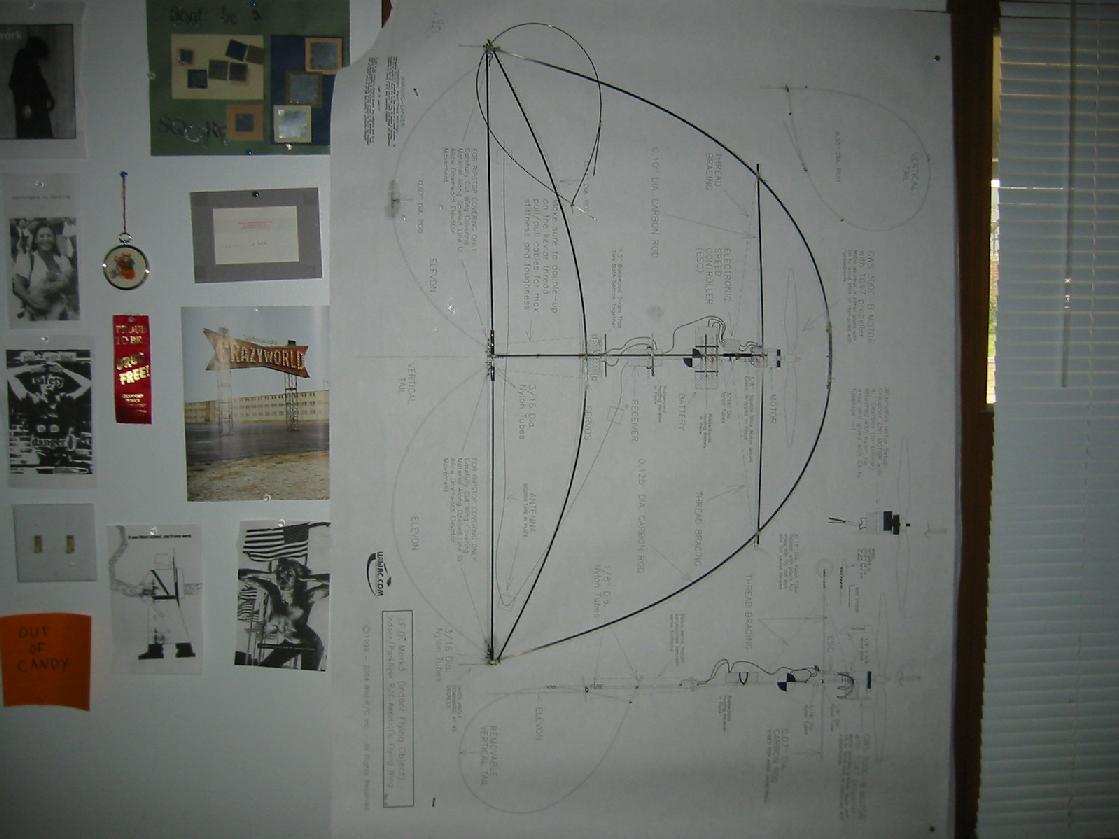
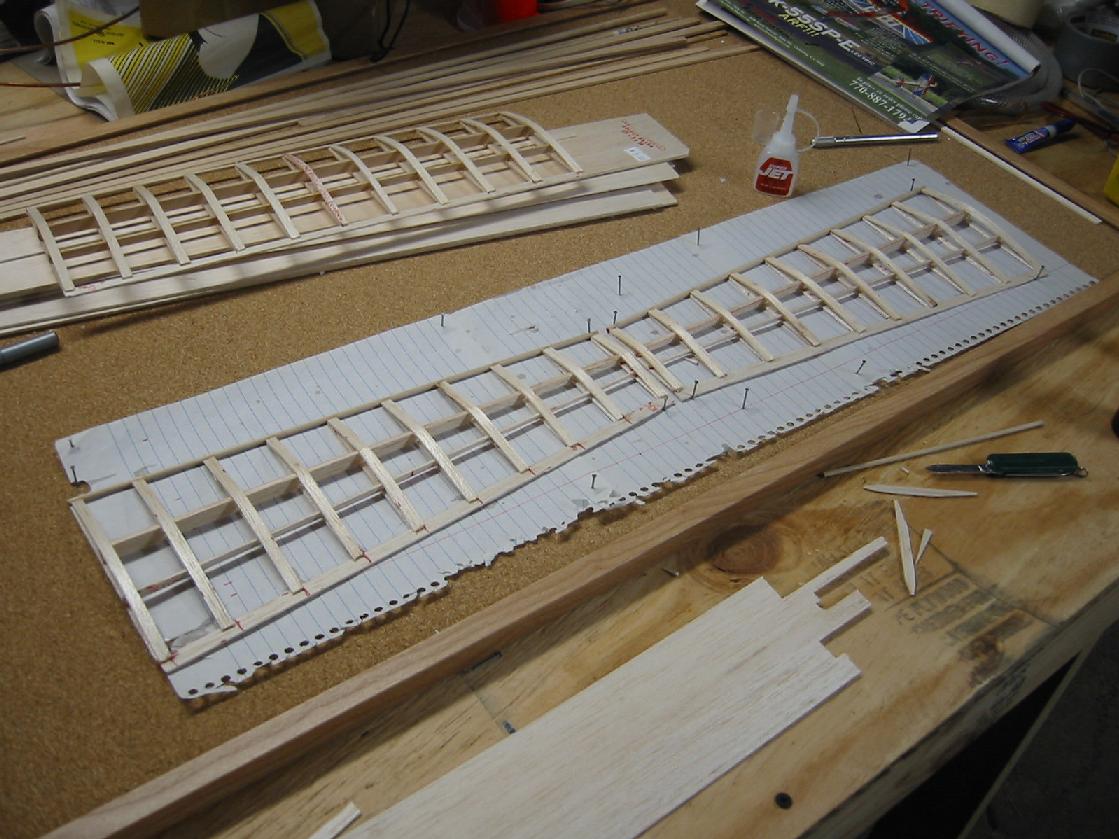
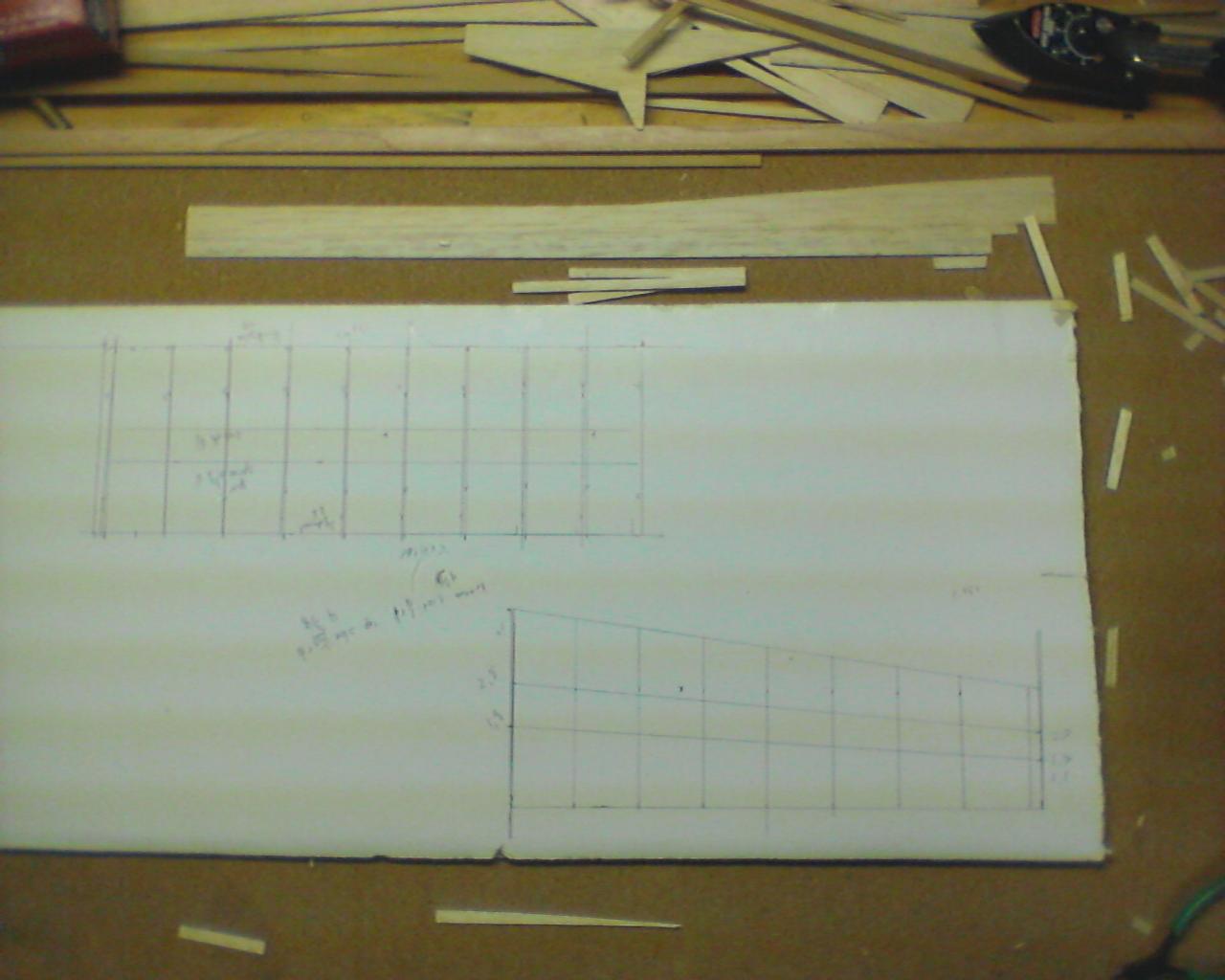
I drew designs on foam board (which I could push pins into):
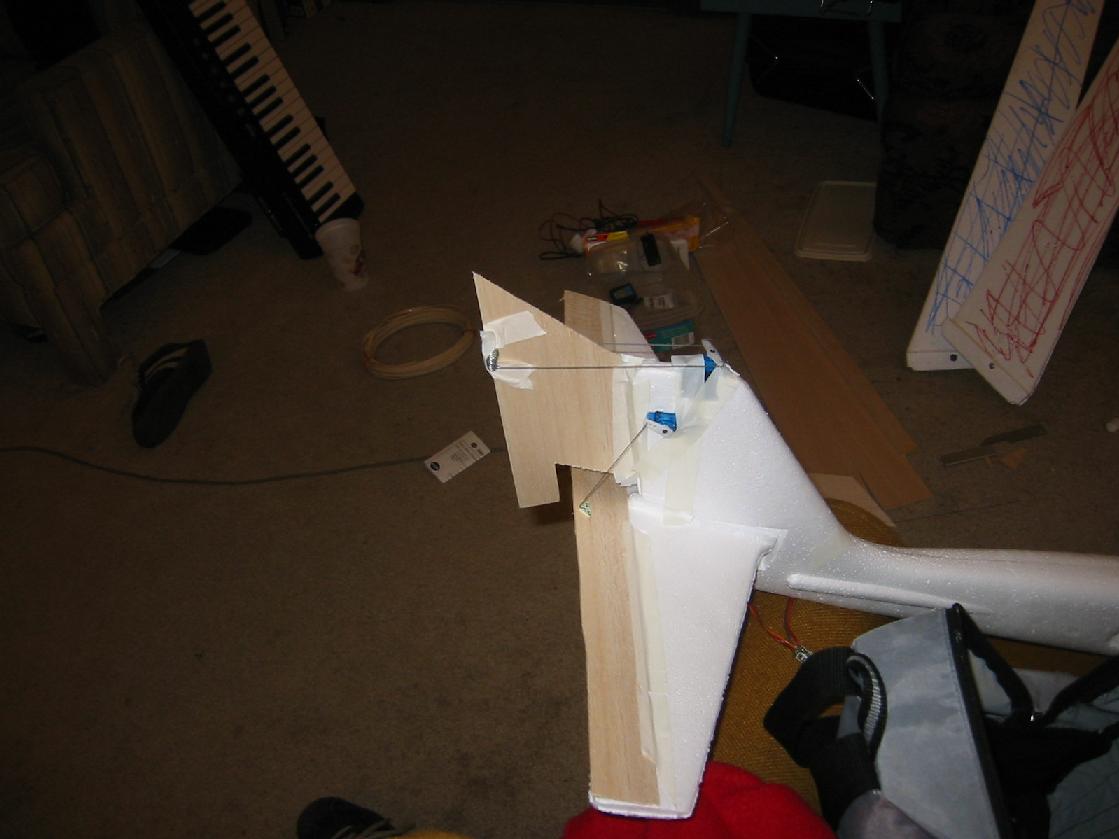
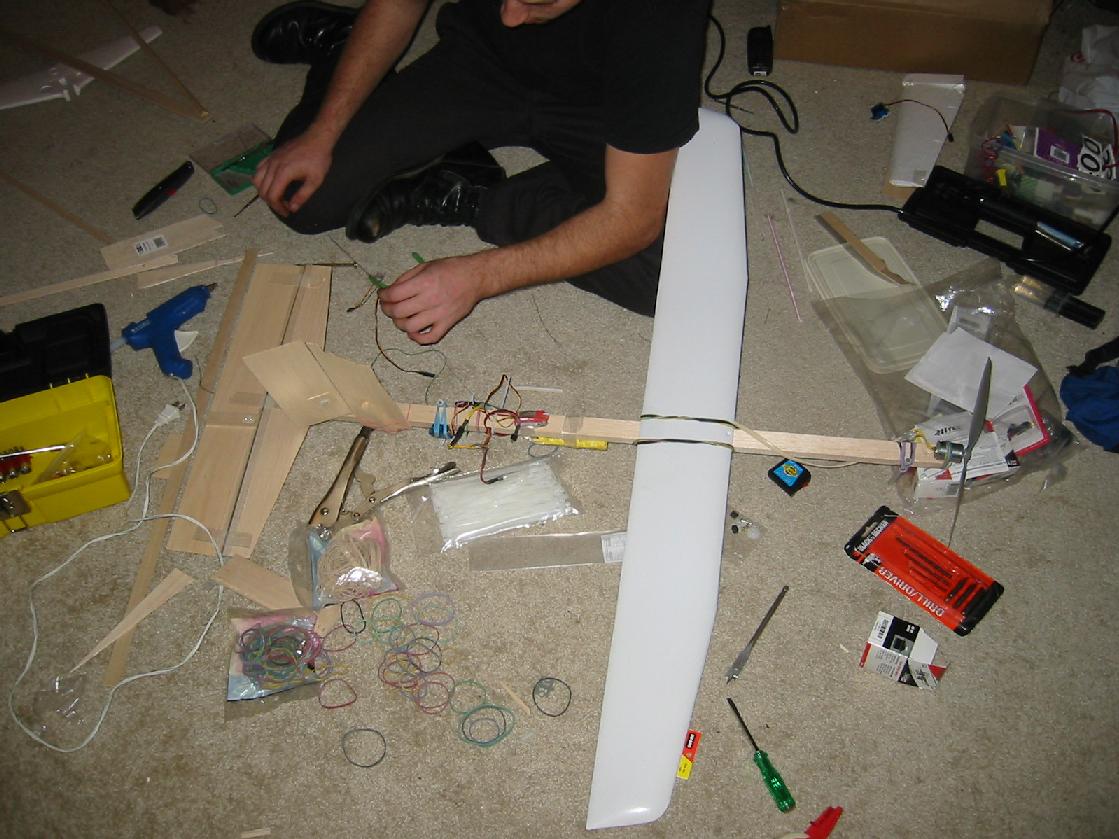
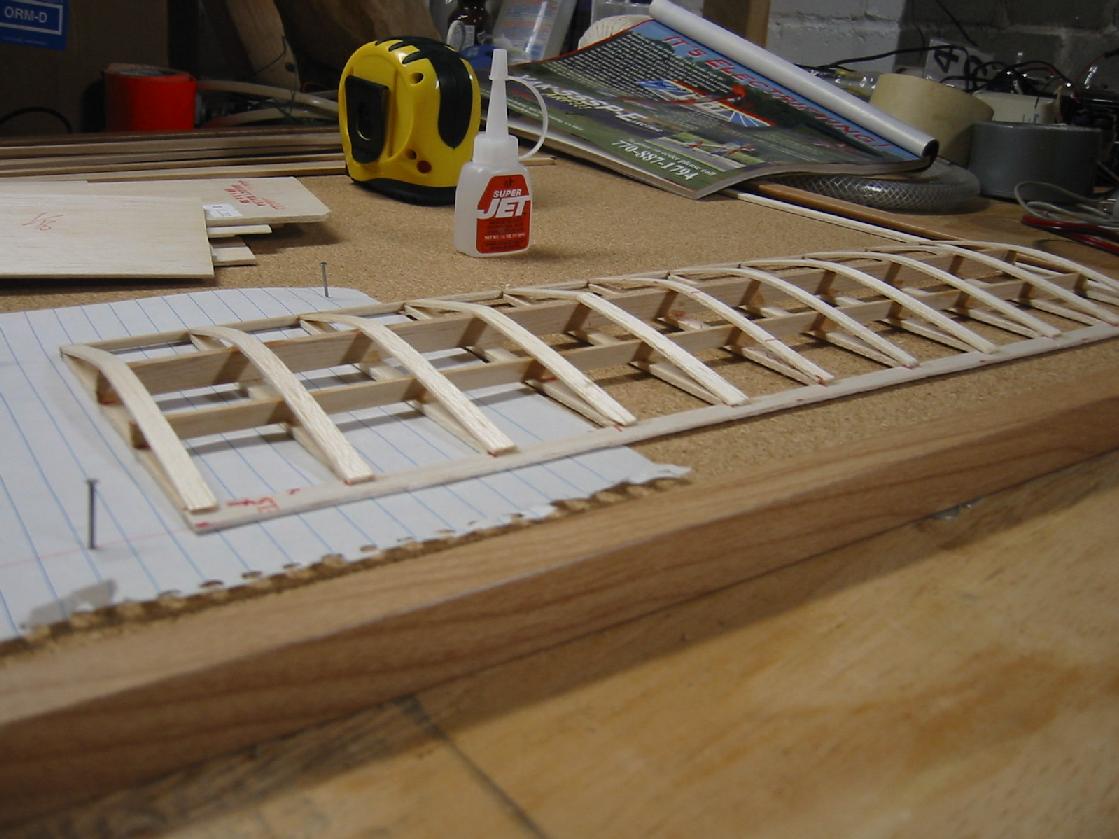
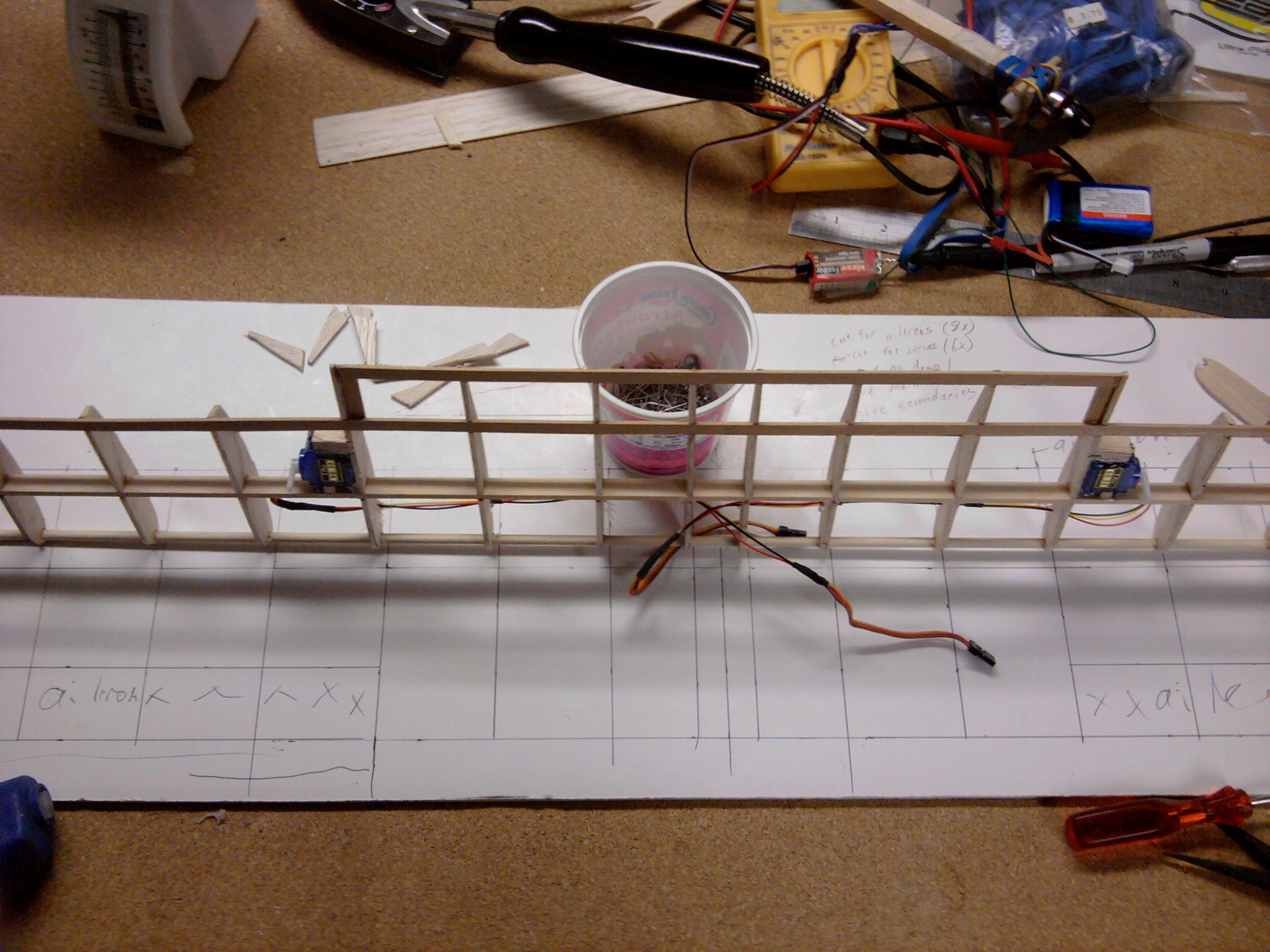
I glued the balsa together (old wing for size reference):

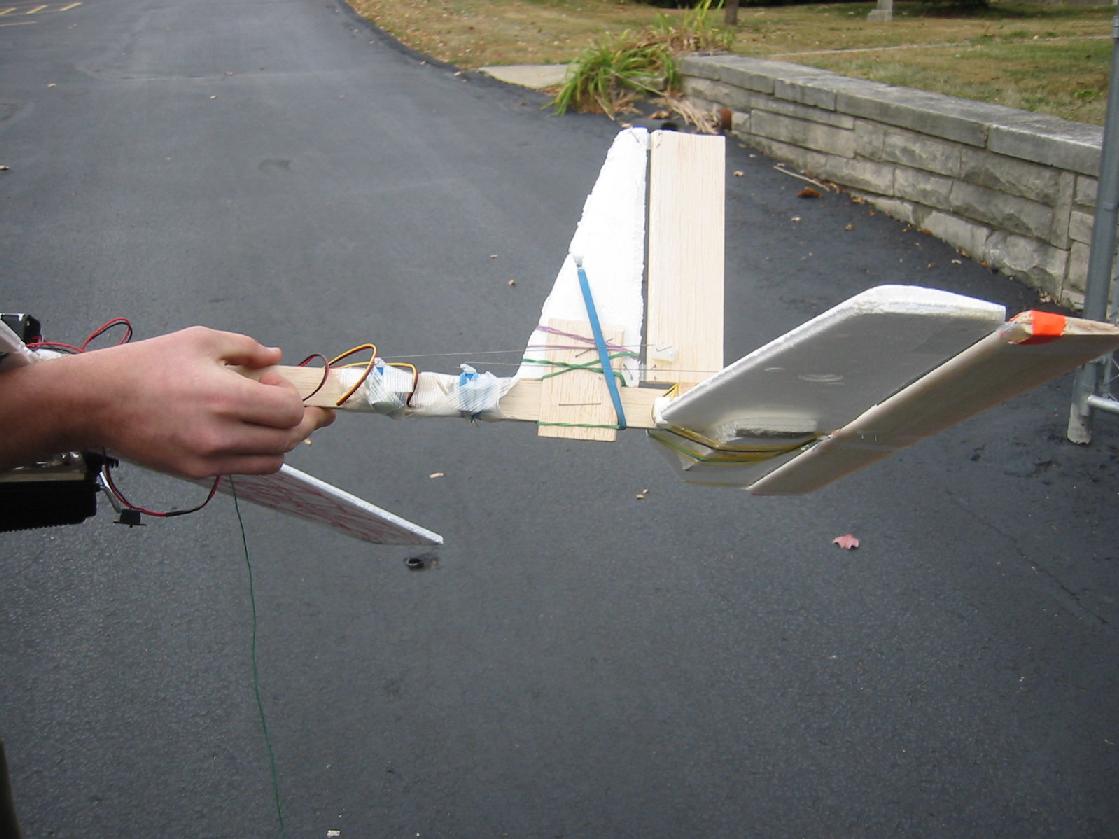
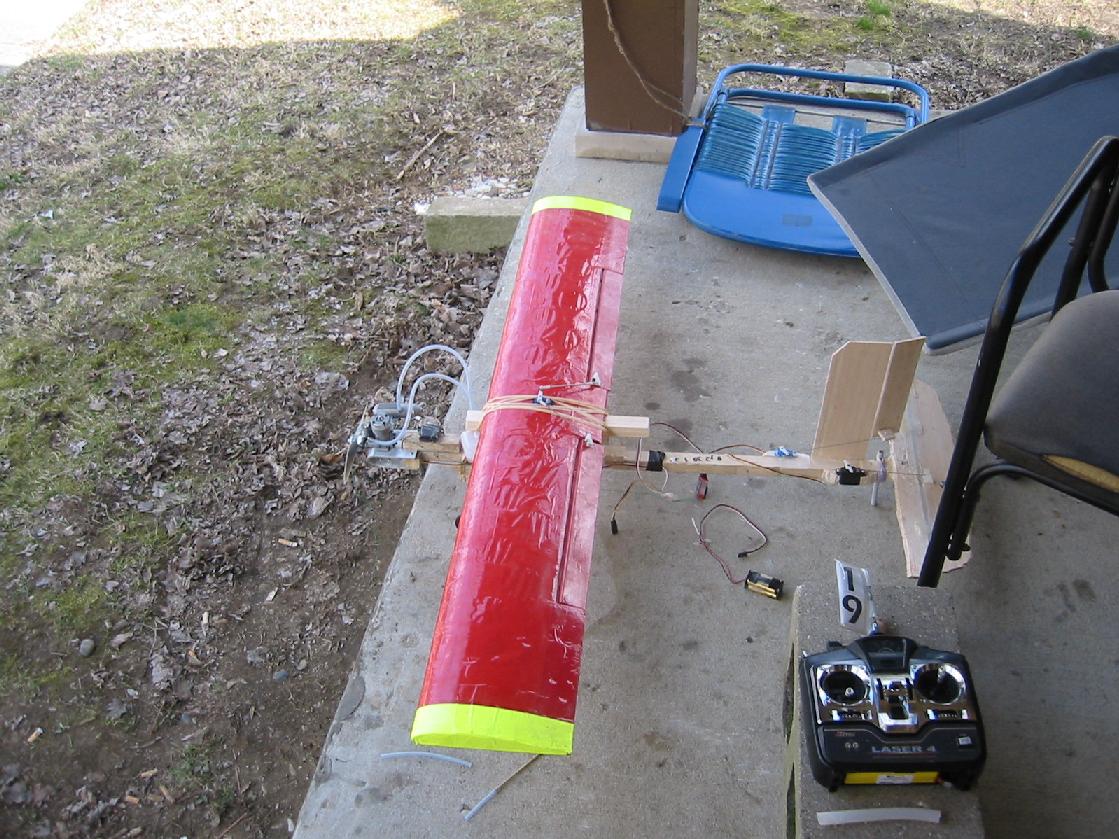
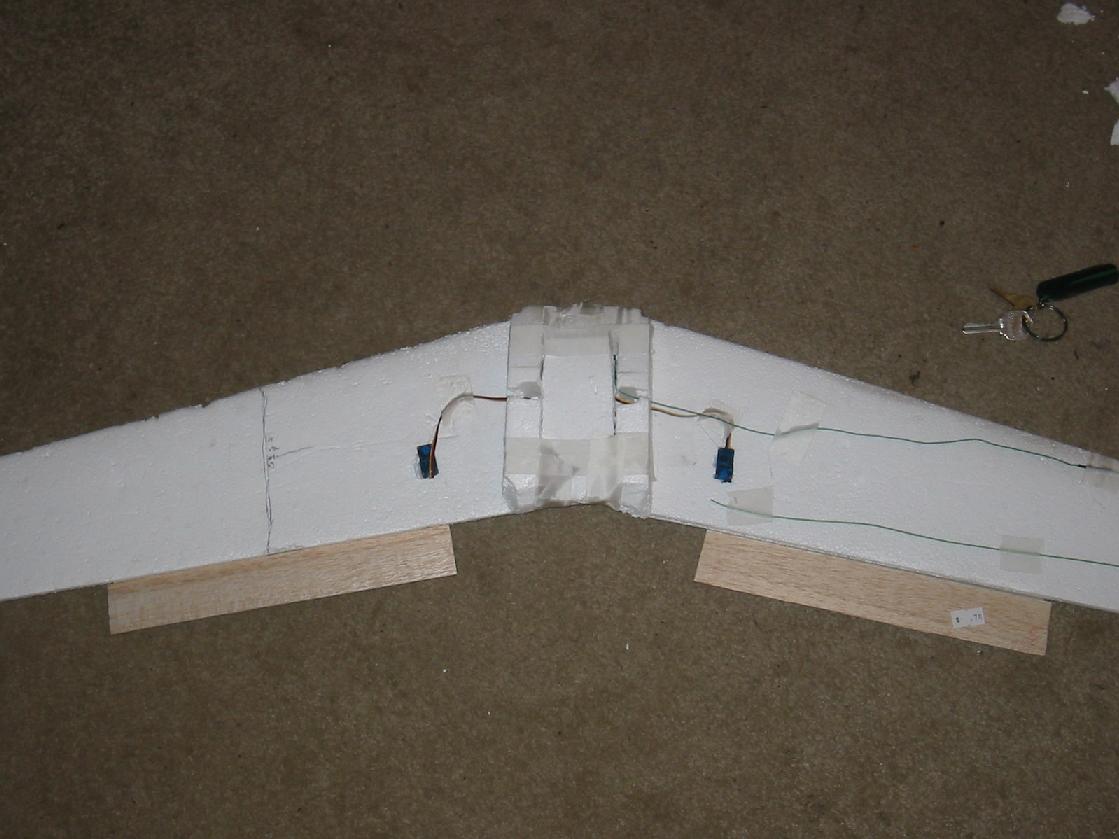
And covered it in the same monokote:

The bigger wing is approximately 42 inch span, 1.5 square foot area,
and 2oz weight. The new wing is approximately 36" span, 1.1 square foot
area, and 1.5oz weight.
I wish the weight had been a little lower. The wood parts weighed
only 0.8oz, so nearly half of the weight is the covering. It's because
I'm using regular monokote instead of one of the new lighter
variants (which are apparently not as advanced as I had assumed).
Speaking of monokote, I have yet to form a satisfactory wrinkle-free
finish.
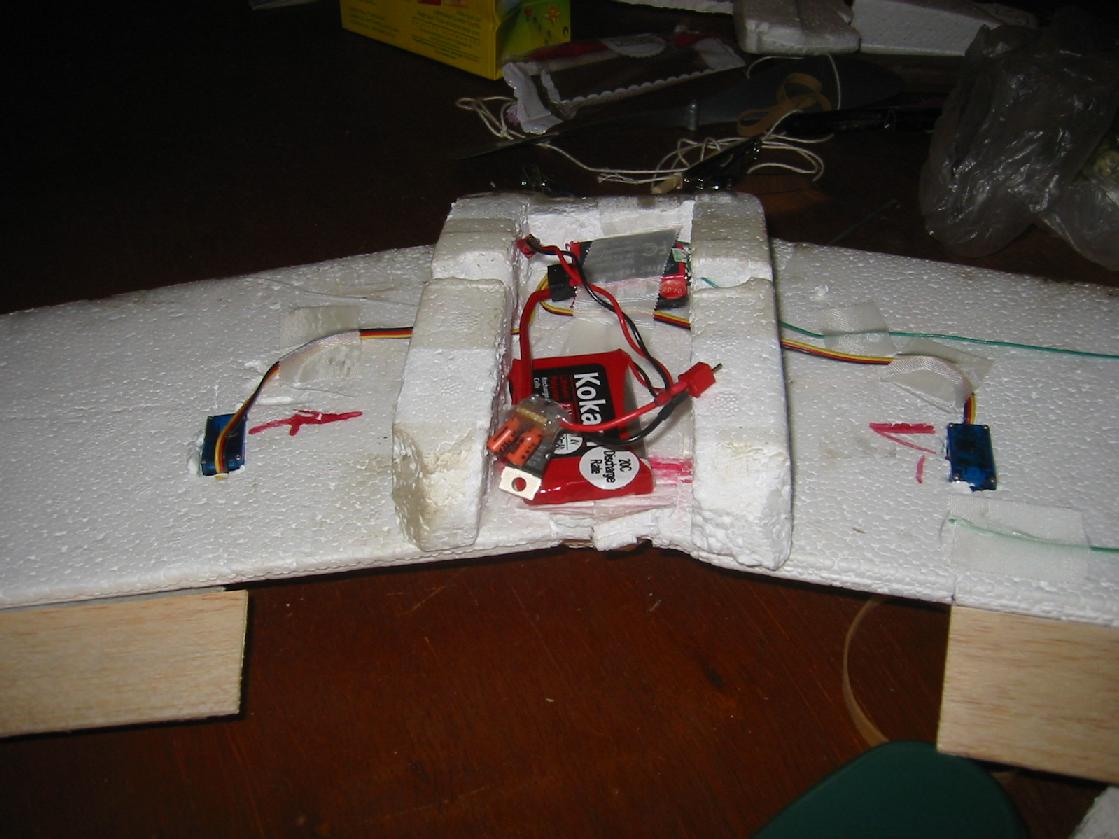
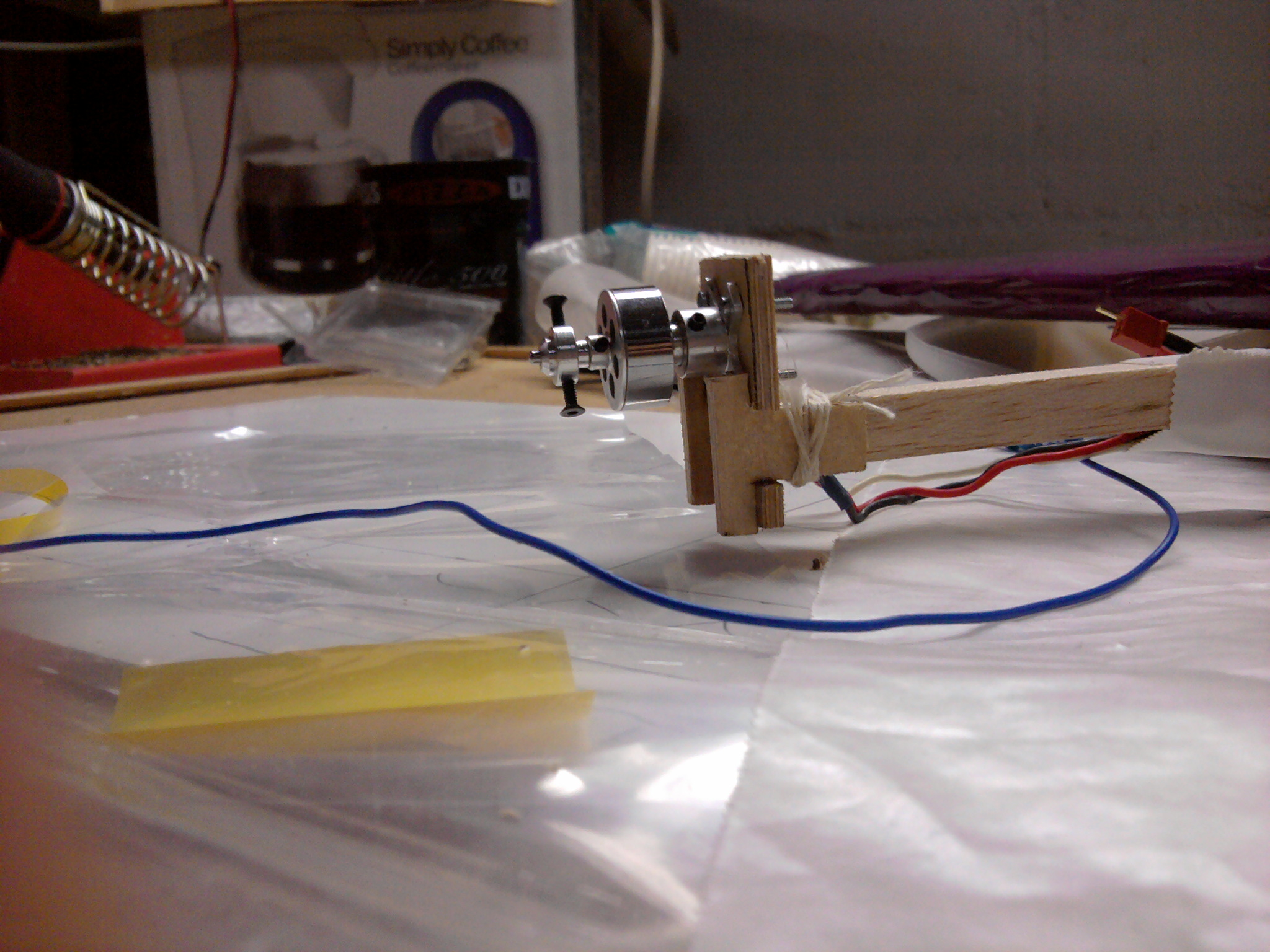
The plan is to use this wing with the smaller brushless motors, so
hopefully it will have less drag. My hope is it should be able to lift
up to 10 oz and still be "light" (i.e., less than 10oz/sqft). But since
it'll be a smaller wing, it'll be more prone to going faster. You never
know. It is really a bummer that it is not substantially lighter
though. But at least it gives the floppy foam wing a run for its money
-- only slightly smaller for the same weight, and substantially stiffer
and more durable.
The next day that it is not so windy, I will take it out and find out
how it works in practice.
Switching gears to TX issues.
First there is something which has been bothering me for a long time.
Channel 1 on my Hitec Focus TX has no trim. Moving the tab has no effect.
Taking it apart revealed a rather interesting design. To their
credit, the trim setting is entirely mechanical. Instead of having a
second potentiometer (introducing all manner of possible failure
modes), they simply have a little levered system whereby the trim
tab rotates the main potentiometer independently of the stick input. Way
neato.
However (for some reason unknown to me) two of the pieces in the
trim linkage are separate pieces even though they literally rest on
top of eachother with complete overlap. They were joined at the
factory by melting a groove across them. For whatever reason,
this approach failed (it has always seemed like a half-assed approach
to me when I have used it). So the tab could move without moving the
rest of the linkage. I didn't think CA would work between too pieces
of plastic, and my plastic cement has apparently aged out (nevermind
that I don't hardly know how to use it anymore). So I decided to go
ahead and run with their stupid approach. But instead of making a
single groove between the pieces, I made a dozen "spot welds" between
these two pieces, all along their common perimeter. I simply tapped
the tip of my soldering iron at their intersection, which created a
nice little shared divot and appeared to do a pretty thorough job of
melting the plastic together. Anyways, it's holding for the
moment.
This is a little bit reassuring to me. I bought an extraordinarily
inexpensive "ExceedRC" 6-channel 2.4GHz TX/RX. It has a number of issues of
its own that I'm working through. But the single issue that I identified
as "most Chinese" is that one of the solder joins was so sloppy that it
defied belief -- they literally bridged a quarter inch gap with free-form
solder. If even a Hitec radio has the same sort of really unacceptable
quality control, then I probably didn't make a mistake buying the crappy
ExceedRC thing.
So that's one long-standing TX problem. The other one is that my
"PIC TX" module is broken. I should describe it -- I built it a few
years ago but never actually tested it with a real airplane.
The Hitec Focus has a trainer port on the back which has a pulse
chain input and output. I modified the Focus so that the trainer
switch is a regular persistent switch, rather than a momentary contact.
This way, I
could hook up a device to the trainer port which processes the pulse
chain and produces its own pulse chain, which the radio will then
transmit to the plane as though it came from a trainer
connection.
The device that processes the pulse chain is built out of a
Microchip PIC18F1320 (a tiny and inexpensive 8-bit embedded
microcontroller), a 16x4 text LCD module, 5 buttons (accessing soft
menus), a 7805 voltage regulator, and a transistor (to drive the
output pulse chain at 9V). It runs a little piece of
software I wrote in "GF", a little FORTH-like language that I wrote a
compiler for. I also wrote the "pic18asm" assembler that was used,
because the regular PIC syntax is stupid.
The software implements input centering/scaling (to convert the
stick position into positive/negative numbers within a range), exponential
(well, it's on my todo list), arbitrary mixing (allows
specifying a 4x4 matrix of mixing coefficients), differential (have
greater range above or below the center point; for example for
ailerons to counter adverse yaw), and output scaling/centering (to
convert it back to a duration in microseconds for the pulse chain). It
has 5 configuration banks, so it can store configuration for 5
independent models and switch between them at will. More than sufficient
for the occasional elevon/Y-tail that I need to control (and I'm not into
helicopters anyways).
So basically I exchanged a great deal of time spent in my area of
expertise (uh, compiler design, *sigh*) for a working computer radio.
It has a bug when dealing with negative channel values that produced
all sorts of issues. I found it just now by inspecting the behavior and
then reading the source code. But I haven't uploaded the fix yet,
because I know if I do then I will be up all night working on it.
There are pictures and additional information available at:
http://www.galexander.org/pic/.






















































{kind=link}